Pathfinding Algorithms AI Project
A demo where several Steering Behaviors are tested alognside a Pathfinding Algorithm and some Decision Making.
A demo where several Steering Behaviors are tested alognside a Pathfinding Algorithm and some Decision Making.
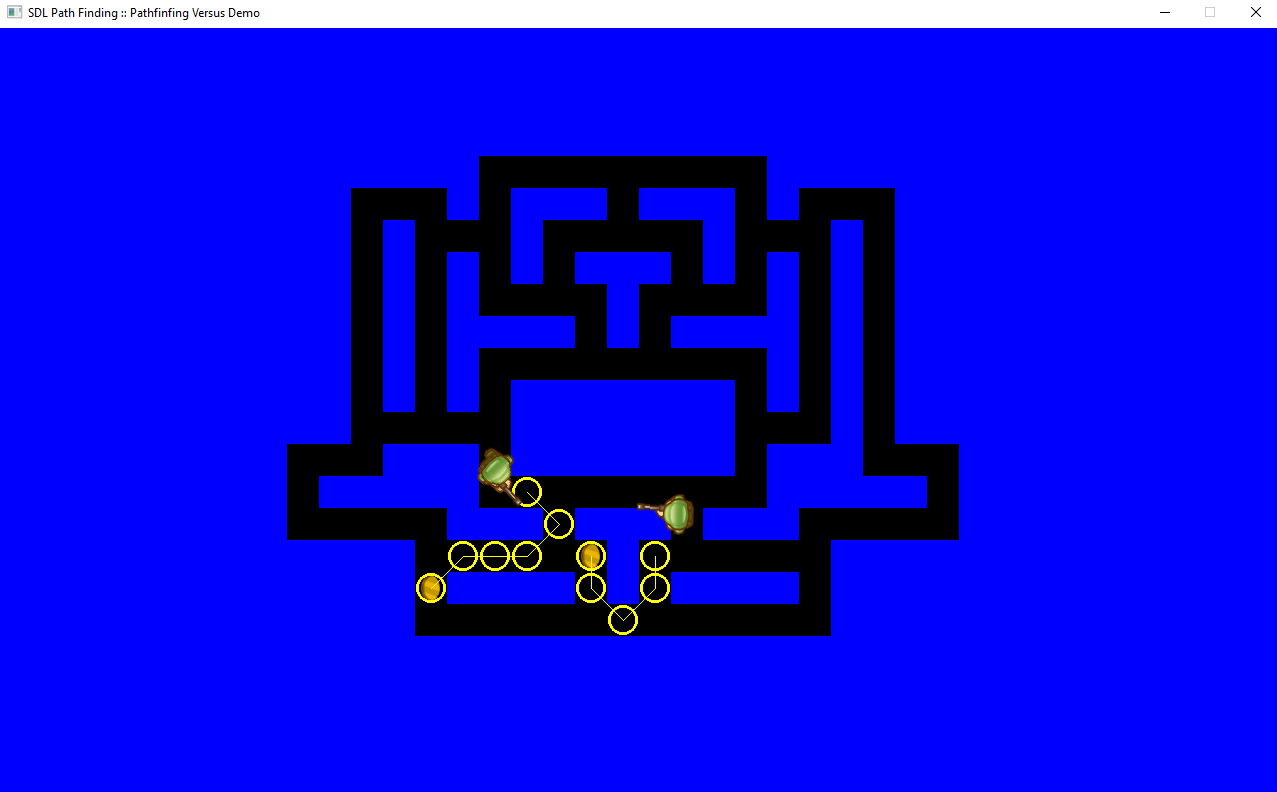
The objective of this project is to test some Pathfinding Algorithms, some with weighs that modify paths, and some early decision making when encoutnering another agent (altering paths). There is a scene for each test. In every scene, the agent's goal is to obtain a coin that randomly spawns on the map.
The user can change the scene using the number keys:
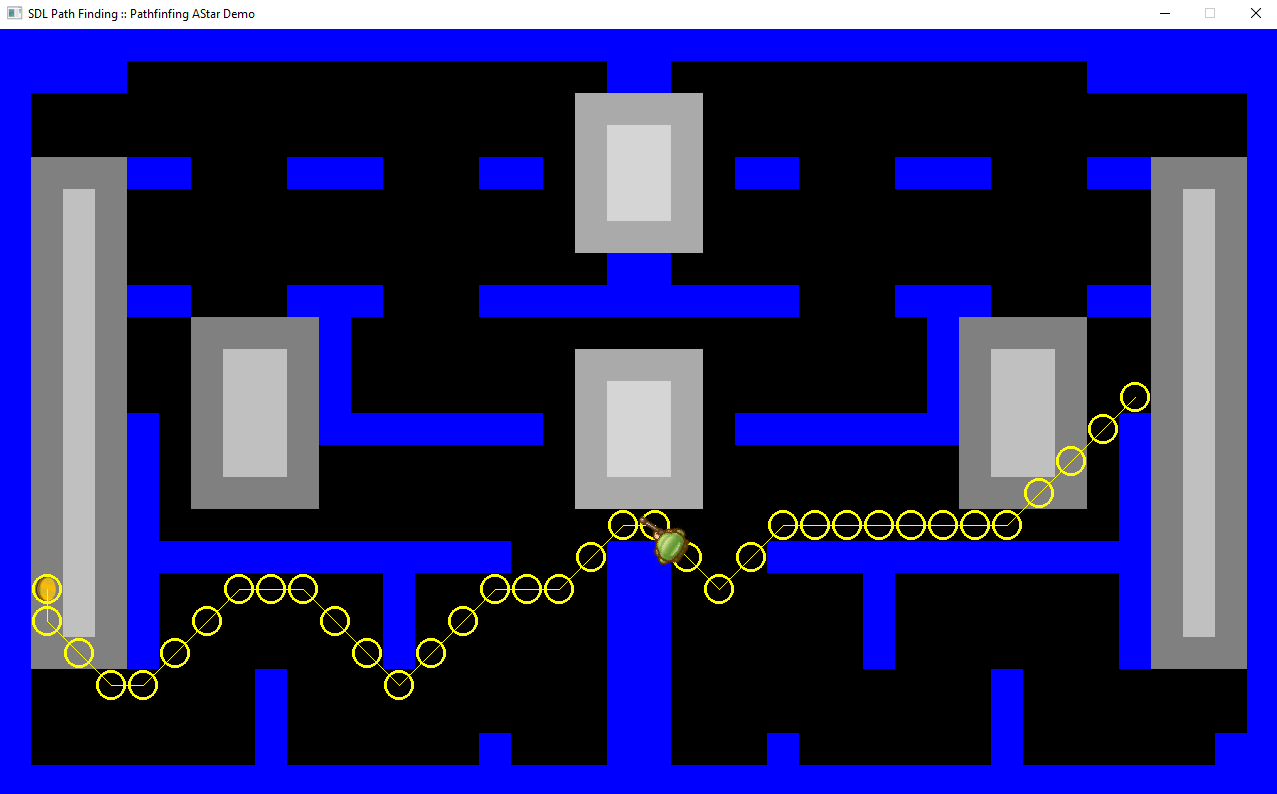
The space where the demo takes place is a maze where blocks in blue represent walls, and empty blocks (in black) are walkable zones. There are some scenes that include zones in different grey tones. Those are meant to be walkable zones that are harder to get through (weighs). The lighter the grey the harder to walk across. This makes the demos more interesting and more visual when the Algorithm calcultes a path to the coin avoiding those zones, or going through them in those cases in which avoiding them would have been too much movemenet (not optimal).